brainstorming strategy ideas
We came up with many different ideas for game-play strategies in our early team meeting. We all agreed that the foundation of our robot should be a strong, heavy robot with a lot of pushing power, then we could add additional strategies on top if time permitted. Shown below are three of our favorite strategy ideas that we likely would have implemented if we had time.
Ramped Skirt: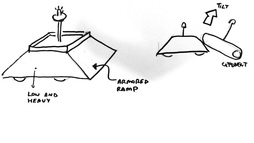
|
Rotate-Escape: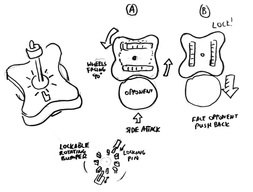
|
Wall Hugger: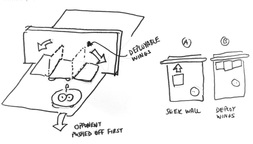
|
Beacon Sensor Mounting
Properly mounting the phototransistors in the beacon sensor proved to be tricky. Because of our limited sensitivity issues (see Beacon Sensing section) the phototransistors we extremely finicky about the angle at which they were pointed. We mostly mounted the phototransistors by putting them in straws and taping down the straws, but we often found ourselves wishing we had taken the time to come up with a more robust solution.

Beating the brick milestone
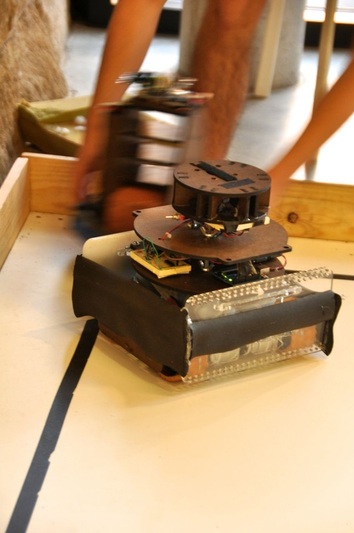
The minimum requirements for the project was to beat "The Brick" - a static robot consisting of a brick on casters. We worked hard to beat the brick almost a week ahead of schedule, and this got us second seed in the tournament and a bye in the first round of the tournament! It also gave us confidence early on, and got us into a state of mind where we could take risks - work by play, not by stressing to make the grade.

After "beating the brick," the minimum project check-off, where we had to defeat a static opponent.
The robot upon beating the brick.
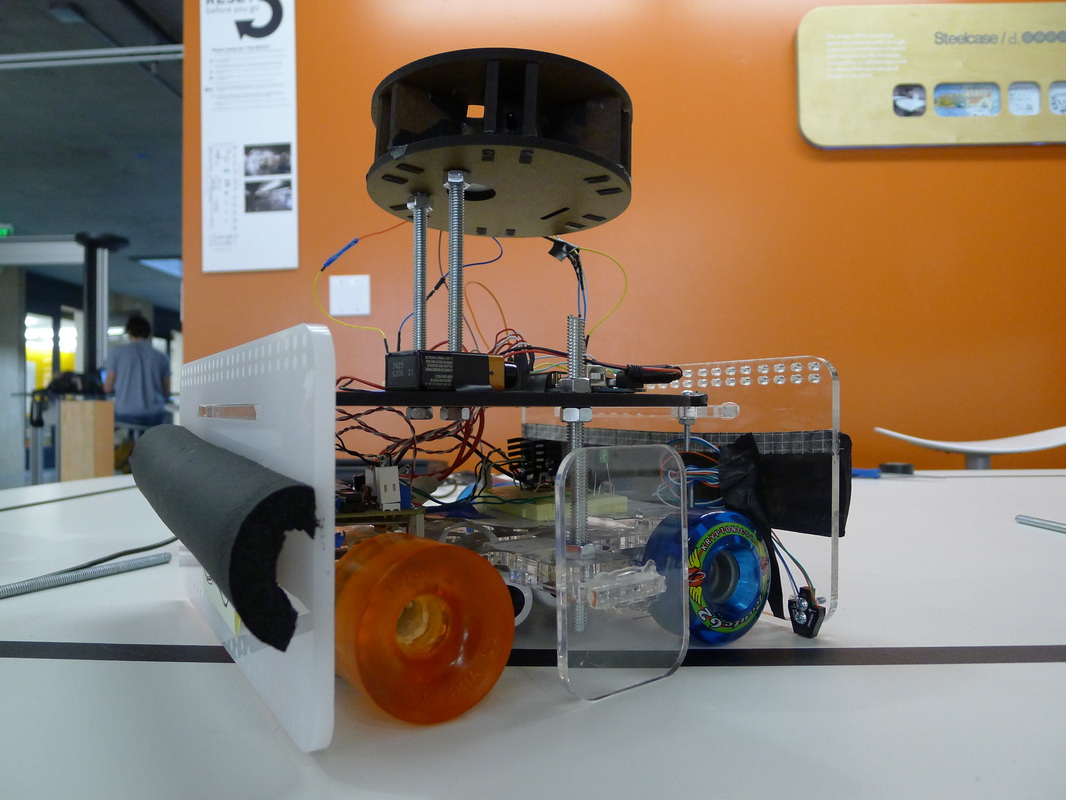
Adding weight
Adding weight was an important step before the final competition, and took a lot more time than expected. We took an entire day to clear off a platform of the robot for weights. It paid off in the end however, as we were able to overpower our competition.

|
|
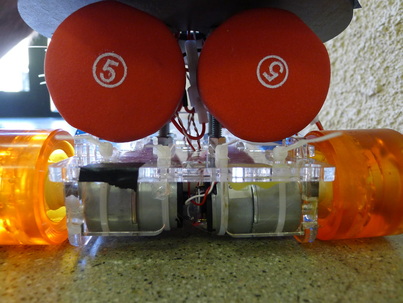
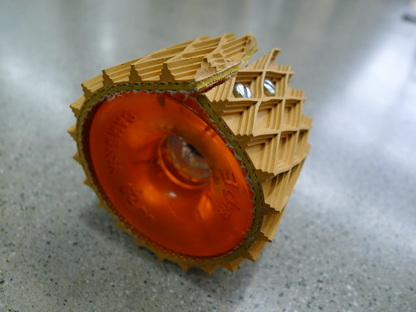
Higher Traction Wheels
The weekend before the competition, we decided to add higher traction materials to our wheels. We did some comparative testing with a spring of fixed spring constant and determined that our robot could pull with more force with Vex Wedgetop treads attached. The treads were attached to the longboards wheels with glue and screws inserted straight into the wheel material.
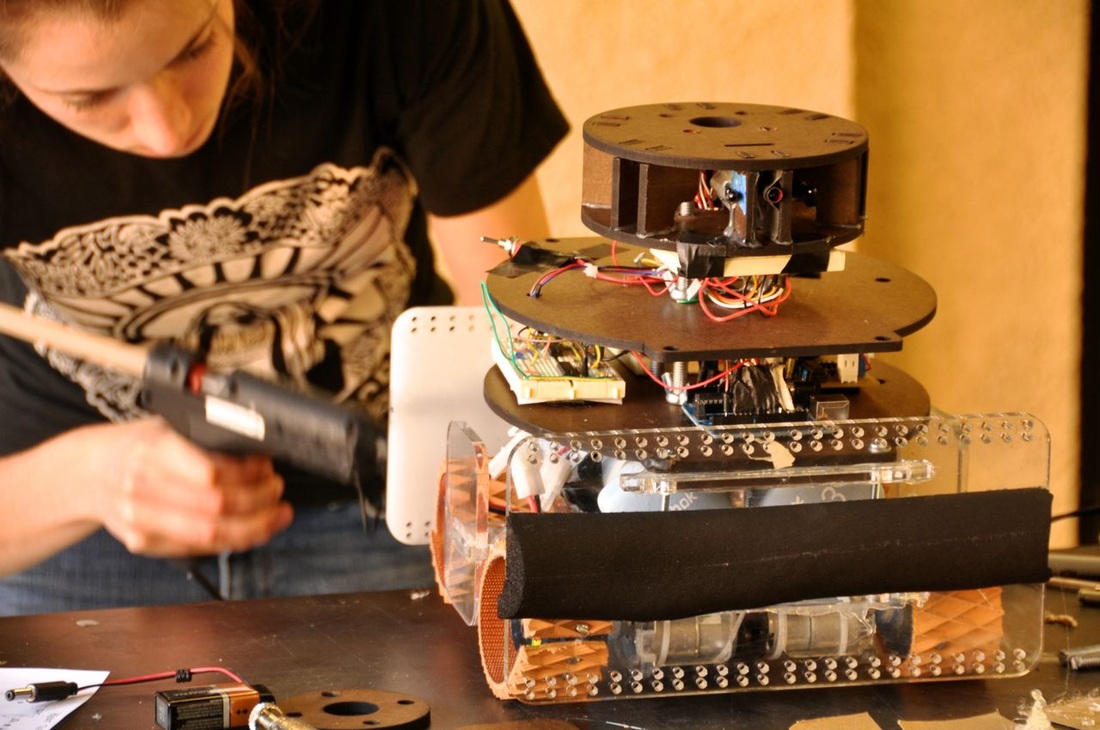
touch-Ups and Adding Bumpers
The competition required that all potential points of contact between two SumoSenators must be covered in bumper material. We spent the final time before the competition making sure our robot was within spec, and robustifying and connections we could.
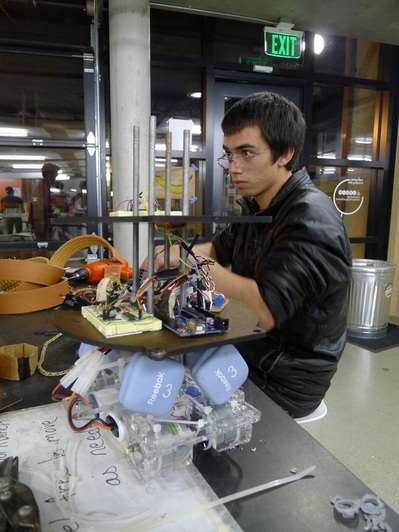
Final Testing before Competition
We ran many tests before the competition to verify that all systems were working together smoothly, and our tracking and attacking routines performed as expected. Results from testing verified our calculations that we would be in no danger of depleting our batteries during (even several) sustained matches. Nevertheless, we kept a charged set of spare batteries ready to be swapped in at a moment's notice!